هوش مصنوعی برای نخستین بار ربات ایستگاه فضایی را ۶۰درصد سریعتر کرد
زهرا وجدانی: در تاریخچه اکتشافات فضایی دستیابی به فناوریهایی که امکان انجام ماموریتها با حداقل نظارت انسانی را فراهم کنند، همیشه نقطه عطف محسوب شده است. تازهترین پیشرفت در این مسیر استفاده از هوش مصنوعی برای کنترل رباتها در محیطهای فضایی است؛ اقدامی که برای نخستین بار در ایستگاه فضایی بینالمللی (ISS) به انجام رسیده است. این فناوری به رباتهای فضایی اجازه میدهد با سرعت و دقت بیشتری در فضا حرکت کنند و به صورت خودکار مسیرهای پیچیده را شناسایی و طی کنند. در این گزارش با تکیه بر نتایج تحقیقات دانشگاه استنفورد و دستاوردهای ربات فضایی Astrobee به بررسی جزئیات این سیستم هوش مصنوعی، نحوه عملکرد آن، دستاوردهای آزمایشی و چشماندازهای آینده پرداختهایم.
هوش مصنوعی وارد مدار شد
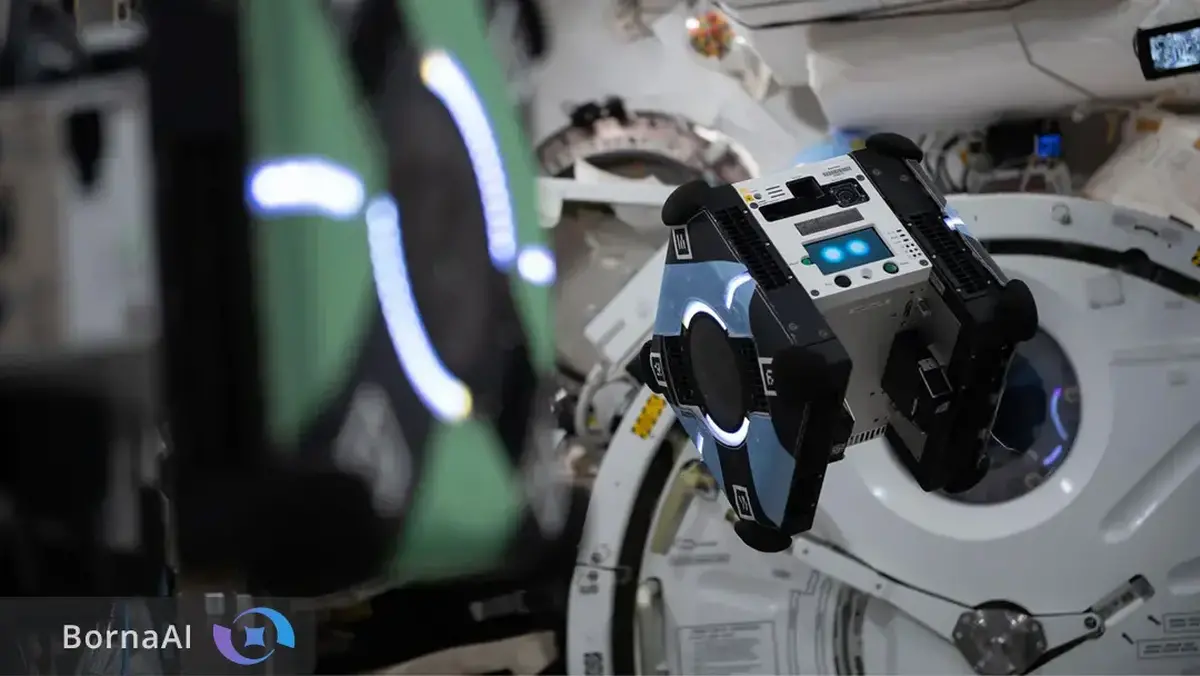
در تازهترین دستاورد علمی، پژوهشگران دانشگاه استنفورد موفق شدند برای نخستین بار یک سیستم کنترل مبتنی بر یادگیری ماشین را در ایستگاه فضایی بینالمللی عملیاتی کنند. این سیستم به ربات آزاد پرواز Cube shaped موسوم به Astrobee اجازه میدهد بدون دخالت مستقیم فضانوردان در راهروهای باریک و محیطهای پیچیده ISS حرکت کند. رباتی به اندازه یک توستر که قبلا برای انجام وظایف پشتیبانی و آزمایشی در ایستگاه فضایی استفاده میشد، اکنون توانایی برنامهریزی حرکتی مستقل با بهرهگیری از هوش مصنوعی را دارد. این دستاورد، نقطه عطفی در رباتیک فضایی محسوب میشود و زمینه را برای ماموریتهایی فراهم میکند که در آنها رباتها با حداقل کنترل انسانی فعالیت میکنند. نتایج این تحقیقات در کنفرانس بینالمللی رباتیک فضایی ۲۰۲۵ (iSpaRo) ارائه شد و مورد توجه جامعه علمی قرار گرفت.
چالشهای محیط ایستگاه فضایی
محیط داخلی ایستگاه فضایی بینالمللی، پیچیده و فشرده است و شامل قفسههای ذخیرهسازی، کامپیوترها، کابلها و تجهیزات آزمایشی میشود. این پیچیدگی برنامهریزی مسیر را برای رباتها دشوار میکند. سومریتا بانرجی، پژوهشگر ارشد این پروژه و دانشجوی دکتری استنفورد توضیح میدهد که روشهای سنتی برنامهریزی حرکتی که در زمین استفاده میشوند در فضا کارایی لازم را ندارند.
مارکو پاوونه، نویسنده ارشد مقاله میافزاید: کامپیوترهای پروازی برای اجرای این الگوریتمها معمولا منابع کمتری نسبت به رباتهای زمینی دارند و شرایط فضا با عدم قطعیت بیشتر و الزامات ایمنی شدیدتری همراه است.
برای مواجهه با این چالش تیم تحقیقاتی یک سیستم بهینهسازی مبتنی بر برنامهریزی محدب ترتیبی (Sequential Convex Programming) طراحی کرد که مسیرهای امن و قابل انجام را شناسایی میکند. با این حال، حل هر مرحله از ابتدا نیازمند زمان محاسباتی قابل توجهی بود و فرآیند را کند میکرد.
هوش مصنوعی به عنوان شتابدهنده مسیر
برای تسریع فرآیند تیم پژوهشی مدل یادگیری ماشینی را روی هزاران راهحل پیشین آموزش داد. این مدل به عنوان یک “Warm Start” عمل میکند، یعنی ابتدا یک حدس اولیه هوشمندانه ارائه میدهد و سپس سیستم بهینهسازی مسیر را اصلاح و کامل میکند. محدودیتهای ایمنی همچنان برقرار است، اما هوش مصنوعی سرعت پردازش را به طور چشمگیری افزایش میدهد.
بانرجی این روش را با انتخاب مسیر بر اساس تجربه واقعی سفرها مقایسه میکند: شما با چیزی شروع میکنید که از تجربه شکل گرفته و سپس آن را بهینه میکنید. این روش به ربات اجازه میدهد مسیرهای پیچیده با چرخشها و موانع متعدد را به صورت ایمن و سریع طی کند.
آزمایشهای زمینی و فضایی
قبل از اعزام به ایستگاه فضایی سیستم در مرکز پژوهشی ناسا Ames روی یک ربات شناور شبیهسازی شده در شرایط ریزگرانش آزمایش شد. هنگامی که آزمایشها در ISS آغاز شد، فضانوردان تنها وظایف راهاندازی و جمعآوری دادهها را انجام دادند و سپس تیم زمینی کنترل کامل عملیات را از طریق مرکز فضایی جانسون ناسا بر عهده گرفت.
تیم پژوهشی ۱۸ مسیر حرکتی مختلف را دو بار آزمایش کرد: یک بار با روش سنتی Cold Start و یک بار با روش هوش مصنوعی Warm Start. نتایج بسیار واضح بود: سرعت حرکت ربات بین ۵۰ تا ۶۰ درصد افزایش یافت، به ویژه در شرایط پیچیده و فضاهای تنگ که نیاز به مانورهای دقیق داشتند.
آمادهسازی برای ماموریتهای آینده
ناسا اکنون این سیستم را در سطح آمادگی فناوری ۵ (Technology Readiness Level ۵) طبقهبندی کرده است که نشان میدهد سیستم در یک محیط عملیاتی واقعی قابل استفاده است. این سطح آمادگی ریسک آزمایشهای آینده و ارائه پیشنهادهای ماموریتی جدید را کاهش میدهد.
بانرجی در خصوص آینده فناوری توضیح داد: با گسترش ماموریتهای فضایی و افزایش فاصله رباتها از زمین، امکان کنترل مستقیم از زمین همیشه وجود ندارد. خودمختاری رباتها در این شرایط ضروری خواهد بود.
تیم مارکو پاوونه قصد دارد فناوری یادگیری ماشینی را با مدلهای قدرتمندتر توسعه دهد، مشابه مدلهایی که در سیستمهای زبان طبیعی و خودروهای خودران استفاده میشوند. این اقدام میتواند مسیر دستیابی به رباتهای فضایی کاملا مستقل و با کارایی بالا را هموار کند.
نقطه عطفی در رباتیک فضایی
دستاورد اخیر دانشگاه استنفورد نمایش موفقیتآمیز کنترل مبتنی بر یادگیری ماشین در ایستگاه فضایی بینالمللی به عنوان یک نقطه عطف در تاریخ رباتیک فضایی محسوب میشود. استفاده از Warm Start مبتنی بر هوش مصنوعی توانست سرعت حرکت ربات Astrobee را تا ۶۰ درصد افزایش دهد و مانور در محیطهای پیچیده و فضاهای محدود را ممکن سازد. این فناوری نه تنها محدودیتهای سختافزاری و محاسباتی رباتهای فضایی را کاهش میدهد بلکه مسیر را برای ماموریتهایی با خودمختاری بالا و نظارت حداقلی انسانی هموار میکند.
با توجه به افزایش ماموریتهای فضایی، فاصله گرفتن رباتها از زمین و نیاز به سرعت و دقت بالا در عملیات، چنین سیستمهایی نقش حیاتی خواهند داشت. آینده رباتیک فضایی به سمت خودمختاری هوشمند، یادگیری ماشین پیشرفته و کاهش وابستگی به کنترل انسانی حرکت میکند. این دستاورد همچنین به عنوان یک مدل موفق در استفاده از هوش مصنوعی در محیطهای عملیاتی واقعی، چشمانداز جدیدی را برای تحقیقات و توسعه فناوریهای فضایی باز میکند و زمینه را برای رباتهایی فراهم میسازد که قادرند به تنهایی مسیرهای پیچیده در فضا را شناسایی و طی کنند.
انتهای پیام/