توسعه ربات عصبی عضلانی با مغز مصنوعی

به گزارش خبرنگار علم و فناوری خبرگزاری برنا؛ این سیستم توسط هم کشت نورونهای حرکتی و کاردیومیوسیتها از سلولهای بنیادی ناشی از انسان در یک دستگاه میکرو سیال ایجاد شده است.
توانایی ربات پروانهای شکل برای ایجاد فلاپ باله چپ یا راست و تنظیم سرعت حرکت ممکن است با تحریک نورونهای خاص به دست آید.
رباتها به سرعت متوسط ۰٫۵۲ ± ۰٫۲۲ میلی متر در ثانیه، فرکانس بال زدن باله تا ۲٫۰ هرتز و انحنای چرخش ۰٫۱۱ ± ۰٫۰۴ رادیان در میلی متر دست یافتند.
محققان در بیانیهای گفتند: این یافتهها میتواند توسعه دستگاههای بیو هیبریدی مستقل آینده را که میتوانند به نشانههای زیست محیطی با کمک سیستمهای عصبی یکپارچه پاسخ دهند، آگاه کند.
موجودات زنده برای توسعه الگوهای حرکتی پیچیده و سیستمهای کارآمد که به آنها اجازه میدهد با محیطهای همیشه در حال تغییر تعامل داشته باشند، تکامل یافتهاند. این الهام طبیعی دانشمندان را به ایجاد ماشینهای بیو هیبریدی با استفاده از عضلات زنده قلبی یا اسکلتی همراه با اجزای مصنوعی سوق داده است.
این ماشینها میتوانند حرکات شبیه به زندگی مانند شنا، پیاده روی و چنگ زدن را تقلید کنند. رفتارهایی مثل سکته قندیل یا پمپاژ قلب را تکرار میکنند. با وجود پیشرفتهای آنها، بیشتر رباتهای بیو هیبریدی به دلیل عدم وجود سیستم عصبی، در زمان واقعی با محیط اطراف خود سازگار میشوند.
پیشرفت اخیر نشان داده است که یک شناگر بیو هیبریدی با نورونهای حرکتی و عضلات کار میکند، اما کنترل حرکات آن همچنان چالشبرانگیز است. محققان تاکید میکنند که ترکیب سیناپسهای الکتریکی بیسیم در این ماشینها میتواند کنترل عضلات و پاسخگویی را بهبود بخشد.
به گفته این تیم، هدف از این رویکرد جدید فعال کردن بافتهای عضلانی به صورت انتخابی و بهبود انتقال سیگنال است که منجر به رباتهای بیو هیبریدی پیشرفتهتر و قابل کنترل برای کاربردهای بیومدیکال و نرم رباتیک میشود.
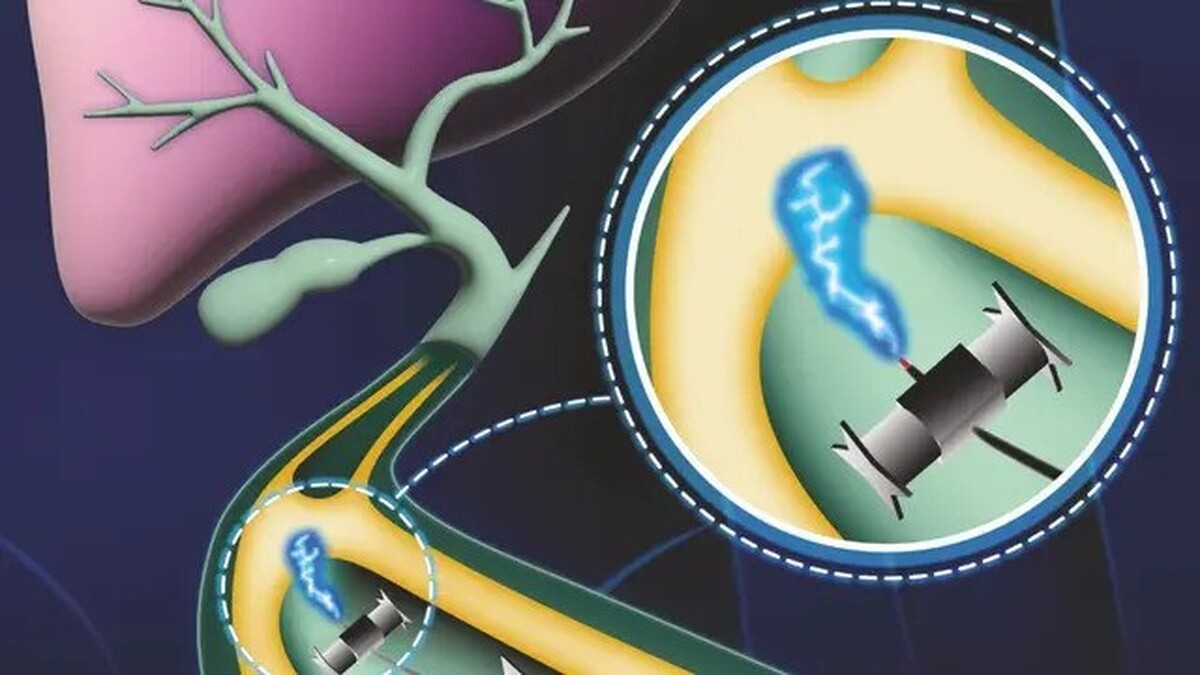
در این مطالعه، محققان ادغام سیناپسهای الکتریکی بین نورونهای حرکتی مشتق از iPSC و کاردیومیوسیتها را به یک ربات بیو هیبریدی نشان میدهند. به جای سیناپسهای شیمیایی، این اتصالات الکتریکی امکان ارتباط سریعتر و دو طرفه بین سلولها را فراهم میکنند.
با استفاده از بیوالکترونیک بی سیم با چندگانه سازی فرکانس، مغز مصنوعی ربات به طور انتخابی نورونها را برای کنترل حرکات باله فعال میکند. سیستم بی سیم سیگنالهایی را برای تحریک بافتهای عضلانی خاص ارسال میکند و اجازه کنترل مستقل سرعت و جهت ربات را با تنظیم بالههای چپ و راست آن میدهد.
این تیم دستگاه خود را با کشت مشترک نورونهای حرکتی (MNs) و کاردیومیوسیتها (CMs) تولید شده از سلولهای بنیادی پلوریپوتنت ناشی از انسان در یک دستگاه میکرو سیال توسعه دادند.
در نتیجه، MNs قادر به حرکت در جهت CMs و تشکیل اتصالات عصبی حرکتی بود. از اهمیت، تقاطعها دارای کانالهای اتصال شکاف بودند که سیناپسهای الکتریکی را به جای سیناپسهای شیمیایی ایجاد میکردند و انتقال دو طرفه سریعتر بین سلولها را تسهیل میکردند.
محققان بعدا دو لایه بافت را در یک داربست انعطاف پذیر با بالههای هیدروژلی به شکل بال پروانه و قطعات الکترونیکی قرار دادند تا امکان ارتباط بی سیم با ربات را فراهم کنند.
این تیم میتواند سیگنالهایی را در فرکانسهای مختلف ایجاد کند تا جریان را در سمت چپ یا راست دستگاه بیوالکترونیک با استفاده از یک سیستم بی سیم چندگانه فرکانس ایجاد کند. از طریق سیناپسهای الکتریکی، سیگنالهای مغز مصنوعی باعث انقباض عضلات قلب با فعال کردن نورونهای حرکتی در هر طرف میشود.
محققان گفتند که آزمایشات نشان داد که ربات میتواند با پرتاب بالههای خود در الگوهای متناوب یا همزمان شنا کند. این تیم در بیانیهای گفت: فعال سازی هدفمند MNs در باله چپ یا راست به ربات اجازه میدهد تا در زاویههای دقیق و با سرعتهای مختلف بچرخد.
نیکول شو، نویسنده فوکوس از دانشگاه کلرادو بولدر گفت: ظهور این شناگر رباتیک عصبی عضلانی بیوالکترونیک، یک مرز بالقوه برای ساخت سیستمهای رباتیک بیو هیبریدی مستقل را نشان میدهد که میتواند کنترل، حس و یادگیری موتور انطباقی را به دست آورد.
جزئیات تحقیقات این تیم در مجله Science Robotics منتشر شد.
انتهی پیام/