ساخت روبات بسیار نرم با استفاده از چاپگر سهبعدی
خبرگزاری برنا؛ روباتهای نرم در سالهای اخیر به طور قابل توجهی پیشرفت کردهاند. روباتهای نرم میکروسکوپی که برای حرکت در مسیرهای دشوار و انجام عملکردهای بیولوژیکی در بدن انسان تعیین شدهاند میتوانند کاربردهای عمیق زیست پزشکی مانند جراحی، پروتز و تسکین درد داشته باشند.
در حال حاضر، عملکرد ذاتی روباتهای نرم مبتنی بر مواد الاستومریک مانند ژل سیلیس است که نیاز به افزودن اجزای حجیم و مراحل پردازش گسترده دارد. آنها در تغییر شکلپذیری در مقایسه با همتایان بیولوژیکی طبیعی خود محدودیتهای عمدهای دارند.
یک تیم تحقیقاتی به سرپرستی اندرسون شوما از گروه مهندسی مکانیک در دانشگاه هنگکنگ (HKU) و توماس پی. راسل از آزمایشگاه ملی لارنس برکلی یک سیستم روباتیک مبتنی بر آب اختراع کرده است که این محدودیتها را از طریق پیشرفتهای علمی برطرف میکند.
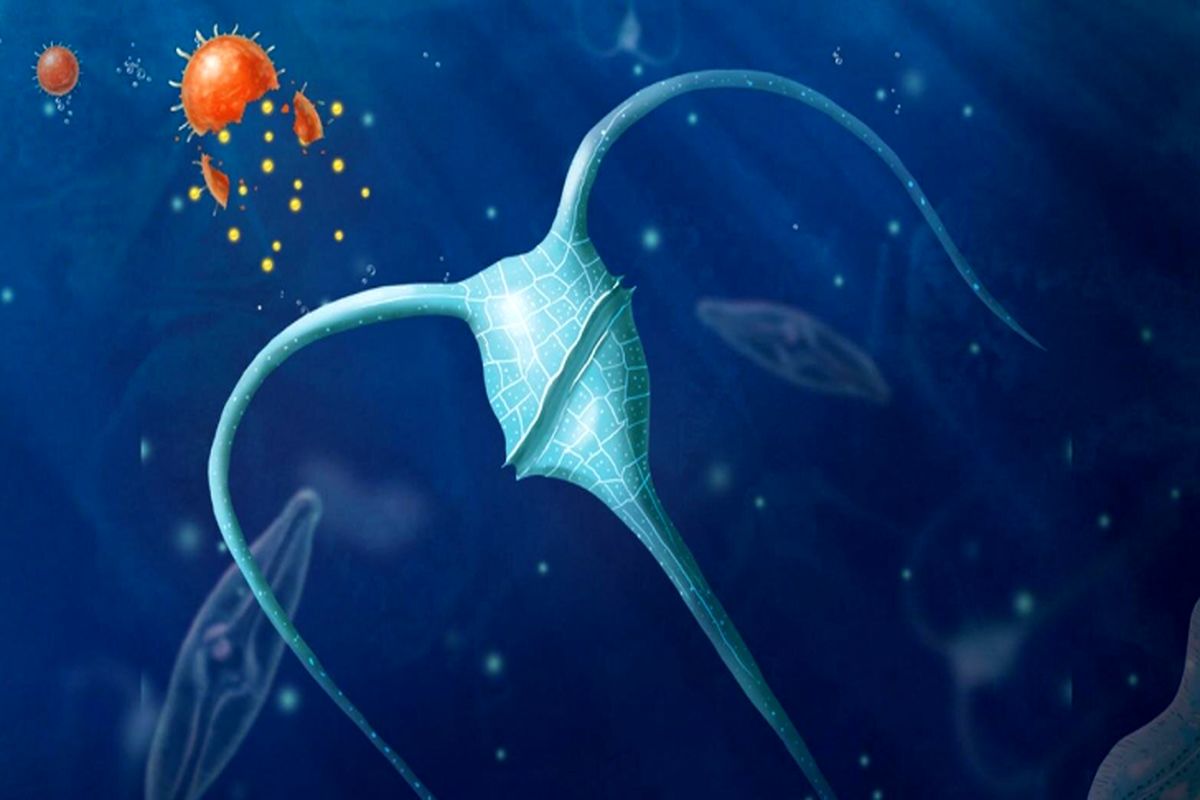
این تیم چیزی موسوم به “Aquabots” را ایجاد کردند، کلاس جدیدی از روباتهای مایع بسیار نرم که عمدتاً از آب تشکیل شده است. سازههای عروقی میکروسکوپی با فناوری چاپ سهبعدی تمام مایع با اسمبل اینترفیسی از یک سیستم دو فاز آبی چاپ میشوند.
نتایج این مطالعه در نشریه ACS Nano منتشر شده است. پروفسور شووم میگوید: «ایده ما این بود که مواد را به گونهای جمعآوری کنیم که شکل مایعات را بگیرد. این شکلها توسط نیروهای خارجی مانند نیروهای مغناطیسی دیکته میشوند و شکلهای دلخواه را تشکیل میدهند.
در حالی که این اشکال را میتوان با استفاده از چاپ سهبعدی تمام مایع تولید کرد، بلوکهای ساختمانی در Aquabots در مقیاس میکرومتر بوده و فراتر از وضوح چاپ هستند. آنها از طریق جداسازی فاز آبی خود مونتاژ میشوند، جایی که یک مخلوط همگن دو فاز مایع را تشکیل میدهد.
پروفسور راسل میگوید: «نمای بیرونی این غشاها به راحتی با اتصال آنزیم، نانوذرات کاتالیزوری و نانوذرات مغناطیسی که باعث پاسخگویی حساس مغناطیسی میشوند، عاملدار میشود.»
Aquaboats میتواند شکل خود را متناسب با ابعاد اشیاء تغییر داده و آنها را گیر بیاندازد. تغییر شکلپذیری معمولاً برای دانشمندان و متخصصان پزشکی یک چالش بوده است، زیرا گاهی اوقات، روباتها قبل از رسیدن به سایتهای هدف در هنگام تحویل دارو در وسط کار گیر میافتند.
انتهای پیام/